PCL公共点转换计算平移参数以及旋转参数
C++/Eigen实现简单的坐标系转换、罗德里格公共点转换
C++ Qt/Eigen拟合三维平面与三维圆
Python 罗德里格矩阵的空间坐标转换——两组公共点求所属坐标系的旋转矩阵与平移矩阵
校验输入的拼音是否符合声母韵母搭配规则(不是根据汉字生成拼音)
## 物联网信息安全——笔记
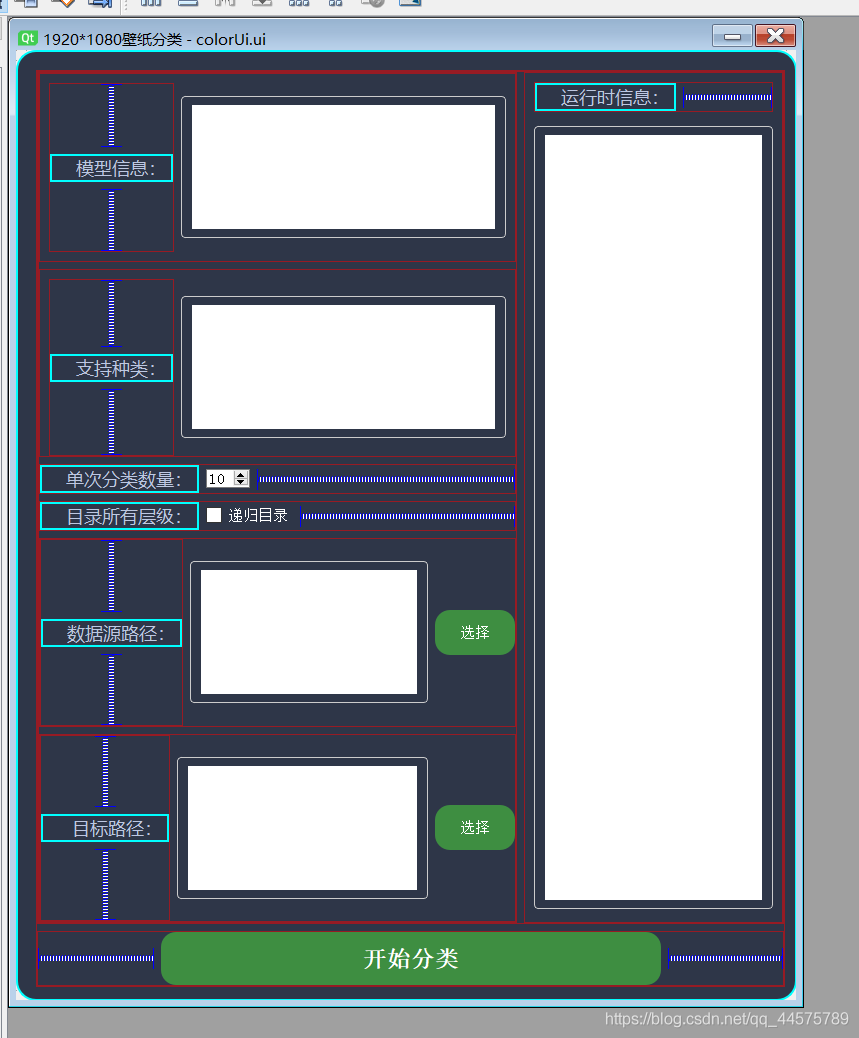
人工智能图片分类Python小程序;主要用于分类自己下载的壁纸,使用的trensflow库卷积神经网
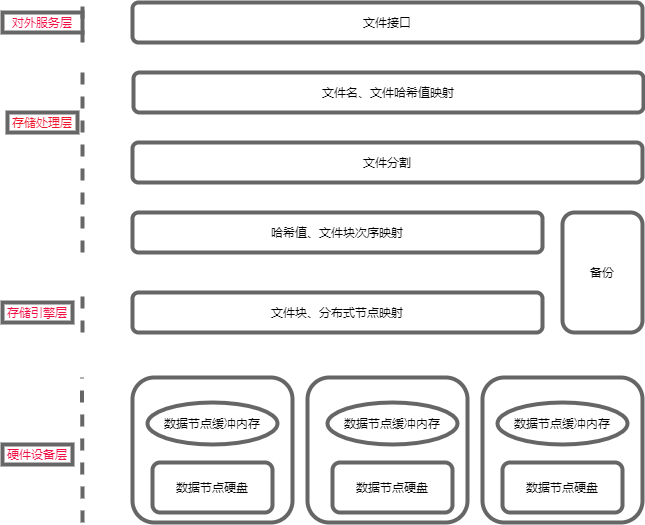
## 海量数据存储与应用系统设计